
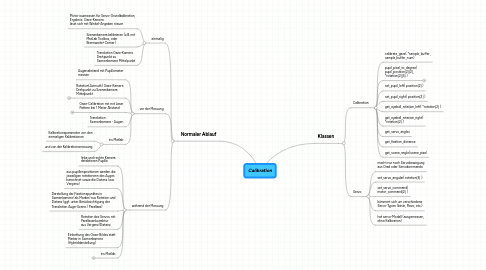
1. Normaler Ablauf
1.1. einmalig
1.1.1. Motor ausmessen für Servo-Grundkalibration, Ergebnis: Gaze-Kamera lässt sich mit Winkel-Angaben steuer
1.1.2. Szenenkamera kalibrieren (z.B. mit MatLab Toolbox, oder Brennweite+Center)
1.1.3. Translation Gaze-Kamera Drehpunkt zu Szenenkamera Mittelpunkt
1.2. vor der Messung
1.2.1. Augenabstand mit Pupillometer messen
1.2.2. Rotation(Azimuth) Gaze-Kamera Drehpunkt zu Szenenkamera Mittelpunkt
1.2.2.1. Mit 1 Meter Abstand von Wand Entfernung der beiden Laserpunkte messen
1.2.3. Gaze-Calibration mit mit Laser Pattern bei 1 Meter Abstand
1.2.3.1. neue Gaze-Calibration kommt auch mit varibalen Winkeln (nicht nur 8.5°) aus
1.2.4. Translation Szenenkamera - Augen
1.2.5. ins Matlab
1.2.5.1. Kalibrationsparameter von den einmaligen Kalibrationen
1.2.5.2. und von der Kalibrationsmessung
1.3. während der Messung
1.3.1. linke und rechte Kamera detektieren Pupille
1.3.2. aus pupillenpositionen werden die jeweiligen rotationenn des Auges berechnet sowie die Distanz (aus Vergenz)
1.3.3. Darstellung der Fixationspunktes in Szenenkamera (als Marker) aus Rotation und Distanz (ggf. unter Berücksichtigung der Translation Auge-Szene / Parallaxe)
1.3.4. Rotation des Servos mit Parallaxenkorrektur aus Vergenz/Distanz
1.3.5. Einbettung des Gaze-Bildes statt Marker in Szenenkamera (Hybriddarstellung)
1.3.6. ins Matlab
1.3.6.1. Pupillenposition
1.3.6.2. AugenRotation
1.3.6.3. Rotation Servo
1.3.6.4. (Motorkommando Servo)
1.3.6.5. tatsächlich angefahrene Servoposition
2. Klassen
2.1. Calibration
2.1.1. calibrate_gaze( *sample_buffer, sample_buffer_num)
2.1.2. pupil_pixel_to_degree( pupil_position[2][2], *rotation[2][3] )
2.1.2.1. was passiert bei monokulär oder augenausfall
2.1.3. set_pupil_left( position[2] )
2.1.4. set_pupil_right( position[2] )
2.1.5. get_eyeball_rotation_left( *rotation[2] )
2.1.6. get_eyeball_rotation_right( *rotation[2] )
2.1.7. get_servo_angles
2.1.8. get_fixation_distance
2.1.9. get_scene_angle/scene_pixel
2.2. Servo
2.2.1. macht nur noch Servobewegung aus Grad oder Servokommando
2.2.2. set_servo_angular( rotation[3] )
2.2.3. set_servo_command( motor_command[2] )
2.2.4. kümmert sich um verschiedene Servo-Typen (binär, Piezo, etc.)
2.2.5. hat servo-Modell (ausgemessen, ohne Kalibrarion)