
Robotska analiza dejanskega stanja objekta pri sanacijah
by Aleksandar Mitrović
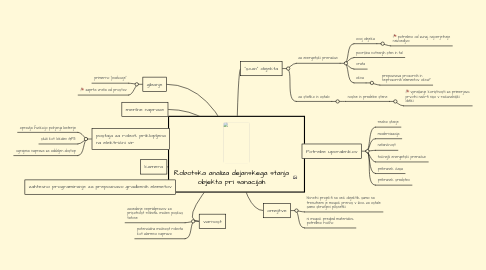
1. kamera
2. merilne naprave
3. postaja za robot, priklopljena na električni vir
3.1. opravlja funkcijo polnjenja baterije
3.2. služi kot lokalen GPS
3.3. vgrajena naprava za oddaljen dostop
4. gibanje
4.1. primerno "podvozje"
4.2. zaprta vrata od prostov
5. zahtevno programiranje za prepoznavo gradbenih elemetov
6. varnost
6.1. zavedanje nepridipravov za prisotnost robota., možen poskus tatvne
6.2. potencialna možnost robota kot alarmno napravo
7. Potrebe uporabnikov
7.1. realno stanje
7.2. modernizacija
7.3. natančnost
7.4. točnejši energetski preračun
7.5. prihranek časa
7.6. prihranek sredstev
8. "scan" objekta
8.1. za energetski preračun
8.1.1. ovoj objeka
8.1.1.1. potrebno od zunaj, najverjetneje neizvedljvo
8.1.2. površina notranjih sten in tal
8.1.3. vrata
8.1.4. okna
8.1.4.1. prepoznava prozornih in neprozornih elementov okna?
8.2. za statiko in ostalo
8.2.1. noslne in predelne stene
8.2.1.1. vprašanje koristnosti za primerjavo, prvotni načrti niso v računalniški obliki