
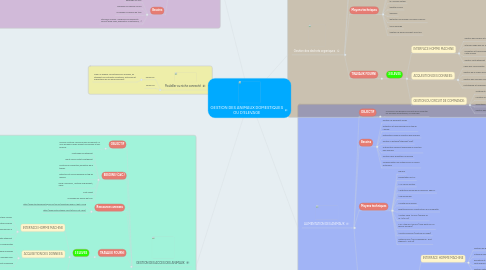
1. REPERAGE DES ANIMAUX
1.1. TRAVAUX FOURNI
1.1.1. 3 ELEVES
1.1.1.1. INTERFACE HOMME MACHINE
1.1.1.1.1. Gestion des horaires et des modes.
1.1.1.1.2. Interface Page web ou Application android
1.1.1.1.3. Reception et transmission des données par la carte arduino
1.1.1.1.4. Gestion carte Ethermet
1.1.1.2. ACQUISITION DES DONNEES:
1.1.1.2.1. Choix des composantes
1.1.1.2.2. Gestion de la chaine d'énergie
1.1.1.2.3. Gestion des données RFID.
1.1.1.2.4. Prototypage et modélisme
1.1.1.3. GESTION DU CIRCUIT DE COMMANDE:
1.1.1.3.1. Traitement des données de la carte arduino.
1.1.1.3.2. Création du circuit de commande
1.1.1.3.3. Algorithme et Programmation
1.1.1.3.4. Gestion des cervo moteur
1.2. OBJECTIF
1.2.1. Indiquer la localisation à plus ou moins grand échelle de son animal. Détection GPS et signal sonore
1.3. Besoins
1.3.1. Repérage via GPS
1.3.2. Repérage via signale sonore
1.3.3. Modulable au besoin de tous
1.3.4. Interface Humain- Machine sous différents format (page Web, application Smartphone, ...)
2. GESTION DES ACCES DES ANIMAUX
2.1. OBJECTIF
2.1.1. Pouvoir contrôler l'accès de nos animaux et ce sous plusieurs mode suivant les horaires et nos besoins.
2.2. BESOINS (CdC)
2.2.1. contrôlable via éthernet.
2.2.2. log et renvoi d'état via ethernet.
2.2.3. Contrôle de l'ouverture,fermeture de la trappe.
2.2.4. Détection et reconnaissance du tag de l'animal.
2.2.5. Mode "verrouillé", "rentrée uniquement", "libre".
2.2.6. Cout réduit
2.2.7. Modulable au besoin de tous.
2.3. Ressources annexes
2.3.1. http://www.touteladomotique.com/forum/viewtopic.php?f=18&t=7008
2.3.2. http://www.instructables.com/id/RFID-cat-door/
2.4. TRAVAUX FOURNI
2.4.1. 3 ELEVES
2.4.1.1. INTERFACE HOMME MACHINE
2.4.1.1.1. Gestion des horaires et des modes.
2.4.1.1.2. Interface Page web ou Application android
2.4.1.1.3. Reception et transmission des données par la carte arduino
2.4.1.1.4. Gestion carte Ethermet
2.4.1.2. ACQUISITION DES DONNEES:
2.4.1.2.1. Choix des composantes
2.4.1.2.2. Gestion de la chaine d'énergie
2.4.1.2.3. Gestion des données RFID.
2.4.1.2.4. Prototypage et modélisme
2.4.1.3. GESTION DU CIRCUIT DE COMMANDE:
2.4.1.3.1. Traitement des données de la carte arduino.
2.4.1.3.2. Création du circuit de commande
2.4.1.3.3. Algorithme et Programmation
2.4.1.3.4. Gestion des cervo moteur
2.5. MATERIELS NECESSAIRES
2.5.1. 1 planche incluant une trappe
2.5.2. Netduino plus (.NET Framework + port ethernet + slot sd)
2.5.3. Alimentation 9v ou 12v
2.5.4. 1 servo moteur type modélisme
2.5.5. 1 lecteur série 125 kHz (Parallax ou ID-12/ID-20)
2.5.6. 2 ou X tag rfid 125 kHz ( type porte clé ou spécial animaux)
2.5.7. 1 bouton poussoir (contrôle du mode)
2.5.8. 1 led RGB
2.5.9. 1 détecteur infrarouge PNA4602M 38KHz .
2.5.10. 1 led infrarouge
3. Poulailler ou niche connecté
3.1. OBJECTIF
3.1.1. Créer un espace confortable pour animaux, en intégrant les contrainte climatique, autonome et respectable de son environnement.
3.2. BESOINS
4. ALIMENTATION DES ANIMAUX
4.1. OBJECTIF
4.1.1. Concevoir une gamelle connecté pour alimenter les animaux domestiques, ou d'élevage
4.2. Besoins
4.2.1. Gestion de différents mode
4.2.2. Détection et reconnaissance du tag de l'animal.
4.2.3. distribution d'eau en fonction des animaux
4.2.4. Gestion à distance (éthernet/ Wifi)
4.2.5. Distribution d'aliment spécifique en fonction des animaux
4.2.6. Gestions des quantités consommé
4.2.7. Programmation du systeme pour le rendre autonome
4.3. Moyens techniques
4.3.1. Arduino
4.3.2. Alimentation 9 à12v
4.3.3. 1 a 2 Servos moteur
4.3.4. 1 détecteur infrarouge PNA4602M 38KHz .
4.3.5. 1 led infrarouge
4.3.6. 4 Capteurs de niveau
4.3.7. Pallette bois pour construction de la maquette
4.3.8. 1 lecteur série 125 kHz (Parallax ou ID-12/ID-20)
4.3.9. 2 ou X tag rfid 125 kHz ( type porte clé ou spécial animaux)
4.3.10. 1 bouton poussoir (contrôle du mode)
4.3.11. Netduino plus (.NET Framework + port ethernet + slot sd)
4.4. TRAVAUX FOURNI
4.4.1. 3 ELEVES
4.4.1.1. INTERFACE HOMME MACHINE
4.4.1.1.1. Gestion des horaires et des modes.
4.4.1.1.2. Interface Page web ou Application android
4.4.1.1.3. Reception et transmission des données par la carte arduino
4.4.1.1.4. Gestion carte Ethermet
4.4.1.2. ACQUISITION DES DONNEES:
4.4.1.2.1. Choix des composantes
4.4.1.2.2. Gestion de la chaine d'énergie
4.4.1.2.3. Gestion des données RFID.
4.4.1.2.4. Prototypage et modélisme
4.4.1.3. GESTION DU CIRCUIT DE COMMANDE:
4.4.1.3.1. Traitement des données de la carte arduino.
4.4.1.3.2. Création du circuit de commande
4.4.1.3.3. Algorithme et Programmation
4.4.1.3.4. Gestion des cervo moteur
5. Gestion des dechets organiques
5.1. OBJECTIFS
5.1.1. Récupérer les effluents des bêtes et les traiter
5.2. Besoins
5.2.1. Traitements des déchets organiques
5.2.2. Gestions à distance
5.3. Moyens techniques
5.3.1. Arduino
5.3.2. Alimentation 9 à12v
5.3.3. 1 a 2 Servos moteur
5.3.4. 1 Palette en bois
5.3.5. 1 Passoire
5.3.6. 1 détecteur infrarouge PNA4602M 38KHz .
5.3.7. 1 led infrarouge
5.3.8. 1 capteur de poids DFRobot SEN0160
5.4. TRAVAUX FOURNI
5.4.1. 3 ELEVES
5.4.1.1. INTERFACE HOMME MACHINE
5.4.1.1.1. Gestion des horaires et des modes.
5.4.1.1.2. Interface Page web ou Application android
5.4.1.1.3. Reception et transmission des données par la carte arduino
5.4.1.1.4. Gestion carte Ethermet
5.4.1.2. ACQUISITION DES DONNEES:
5.4.1.2.1. Choix des composantes
5.4.1.2.2. Gestion de la chaine d'énergie
5.4.1.2.3. Gestion des données RFID.
5.4.1.2.4. Prototypage et modélisme
5.4.1.3. GESTION DU CIRCUIT DE COMMANDE:
5.4.1.3.1. Traitement des données de la carte arduino.
5.4.1.3.2. Création du circuit de commande
5.4.1.3.3. Algorithme et Programmation
5.4.1.3.4. Gestion des cervo moteur