

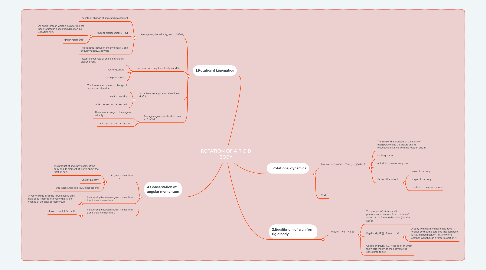
1. 1.Rotational kinematics
1.1. Average angular velocity,ωav= ∆θ/∆t,
1.1.1. The rate of change of angular displacement
1.1.2. Angular displacement,θ= s/r
1.1.2.1. An angle through which a point or line has been rotated in a specified direction in a specified axis.
1.1.2.2. unit in radian (rad)
1.1.3. Relationship between linear velocity, v and angular velocity,ω is v=rω
1.2. Instantaneous angular velocity ω= dθ/dt,
1.2.1. Instantaneous rate of change of angular displacement
1.2.2. vector quantity
1.2.3. radian per second
1.3. Instantaneous angular acceleration α= dω/dt,
1.3.1. The instantaneous rate of change of angular acceleration
1.3.2. vector quantity
1.3.3. radian per second per second
1.4. Average angular acceleration, αav = ∆ω/∆t
1.4.1. The rate of change of the angular velocity
1.4.2. radian per second per second
2. 4.Conservation of angular momentum
2.1. Angular momentum, L=Iω
2.1.1. The product of angular velocity of the body and its moment of inertia about the rotation axis.
2.1.2. vector quantity
2.1.3. unit- kilogram metre square per second
2.2. Relationship between angular momentum, L and linear momentum, p
2.2.1. A vector sums of all the torque acting on a rigid body ism proportional to the rate of change of the angular momentum
2.3. Relationship between angular momentum, L and linear momentum, p
2.3.1. Iω=constant if Στ ⃗ = 0
3. 3.Rotational dynamics
3.1. Moment of inertia,I = ∑_(i=1)^n▒m_(i r^2 )
3.1.1. The sum of the products of the mass of each particle and the square and its respective distance from the rotation axis.m
3.1.2. scalar quantity
3.1.3. unit- kilogram metre square
3.1.4. Factors that affect I
3.1.4.1. mass of the body
3.1.4.2. shape of the body
3.1.4.3. position of the rotation axis
3.2. Στ=Iα
4. 2.Equilibrium of a uniform rigid body
4.1. Torque,τ ⃗ = r ⃗ × F ⃗
4.1.1. The product of a force and its perpendicular distance from the line of action of the force to the point (rotation axis)m
4.1.2. Rigid body,ΣF ⃗ =F_(nett )= 0
4.1.2.1. A body with definite shape that doesn’t change so that the particles that compose it stay in fixed position relative to one another even though a force is exert on it.
4.1.3. Centre of gravity, CG = the point at which the whole weight of the body may be considered to act