
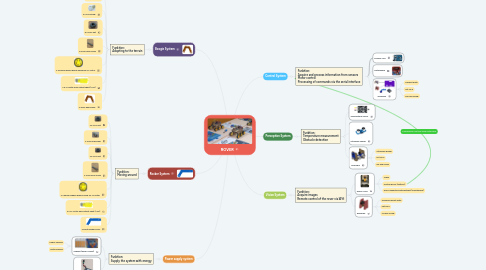
1. Boogie System
1.1. Funktion: Adapting to the terrain
1.1.1. 4 x M13 nut
1.1.2. 2 x M13 screw
1.1.3. 8 x M2.5 nut
1.1.4. 8 x M2.5x20 screw
1.1.5. 4 x 65mm rubber wheel yellow for TT Motor
1.1.6. 4 x TT Motor Dual output shaft (1:48)
1.1.7. 2 Arms Rear bogie
2. Control System
2.1. Funktion: Acquire and process information from sensors Motor control Processing of commands via the serial interface
2.1.1. Arduino Uno
2.1.2. Motorboard
2.1.3. Assembly
2.1.3.1. Support plate
2.1.3.2. nut M2.5
2.1.3.3. M2.5x12 screw
3. Rocker System
3.1. Funktion: Moving around
3.1.1. 4 x M2.5 nut
3.1.2. 4 x M2.5x8 screw
3.1.3. 4 x M2.5 nut
3.1.4. 4 x M2.5x20 screw
3.1.5. 2 x 65mm rubber wheel yellow for TT Motor
3.1.6. 2 x TT Motor Dual output shaft (1:48)
3.1.7. 2 Front Rocker Arms
4. Power supply system
4.1. Funktion: Supply the system with energy
4.1.1. Cabling (Wago-Clamp)
4.1.1.1. Power-cabling
4.1.1.2. Motor cabling
4.1.2. Battery (LiPo, Li-Ion)
5. Perception System
5.1. Funktion: Temperature measurement Obstacle detection
5.1.1. Temperature sensor
5.1.2. Ultrasonic sensor
5.1.3. Assembly
5.1.3.1. Ultrasonic holder
5.1.3.2. nut M2.5
5.1.3.3. M2.5x8 screw
6. Vision System
6.1. Funktion: Acquire images Remote control of the rover via Wifi
6.1.1. ESP32-CAM
6.1.1.1. Video
6.1.1.2. Control Rover (Buttons)
6.1.1.3. WIfi-Connection with hotspot (Smartphone)
6.1.2. Assembly
6.1.2.1. Camera support plate
6.1.2.2. nut M2.5
6.1.2.3. M2.5x8 screw