
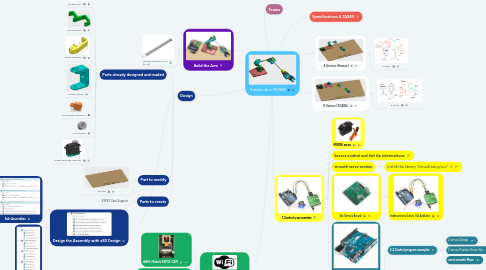
Robotic Arm MG995
von Frédéric XERRI
1. EURLAB
2. Erasmus
3. Teams
4. Build the Arm
4.1. Tube Dint 8-Dext10 L130 x2 (to cut)
5. Design
5.1. Parts already designed and maded
5.1.1. RA-Base-V2 x1
5.1.2. RA-Shoulder x1
5.1.3. MG995-Support x2
5.1.4. MG995-Crank x3
5.1.5. Micro-Gripper-Interface x1
5.1.6. AX12-Bushing
5.1.7. MG995-Servo with Metal Horn
5.2. Part to modify
5.2.1. RA-Table
5.3. Parts to create
5.3.1. ESP32 Cam Support
5.4. Design the Assembly with x3D Design
5.4.1. Sub-Assemblies
5.4.2. Mates
6. B Version (SCARA)
6.1. B Version
7. Specifications & TASKS
8. 1.Control a servomotor
8.1. MG995 servo
8.2. Servos control and Set Up informations
8.3. smooth servo motion
8.3.1. Install the library "ServoEasing.hcc"
8.3.2. ServoEasing – overview of the most important commands
8.3.3. Servo smooth move - example
8.4. Six Servos Board
8.4.1. Instructions Servo Six Arduino
8.5. 2.Control servomotor With Arduino
8.5.1. 2.2.Control program examples
8.5.1.1. 2 servos Sweep
8.5.1.2. 2 servos Position Servo-Six
8.5.1.3. servo smooth Move
9. A Version (Human)
9.1. A version
10. Gripper
10.1. How to read servo feedback?
10.1.1. Example Program