world

This mindmap provides better visualisation of the whole URDF structure of our Robot.

world
par Sheng Yih Pang
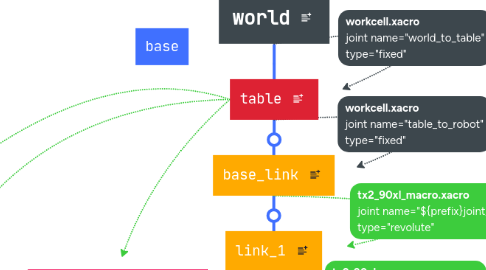
1. table
1.1. base_link
1.1.1. link_1
1.1.1.1. link_2
1.1.1.1.1. link_3
This mindmap provides better visualisation of the whole URDF structure of our Robot.
1.1.1. link_1
1.1.1.1. link_2
1.1.1.1.1. link_3