

1. What is this?
2. The project
3. Mains specifications of the robot Arm
3.1. Weight of the system
3.1.1. Object to move
3.1.1.1. Test tube 12mL
3.1.1.1.1. Material : Polypropylene (PP)
3.1.1.1.2. Dimension
3.1.1.1.3. Weght
3.1.2. Of the complete system
3.1.2.1. To determine
3.2. Height of the movement the arm
3.2.1. Height of the support : 50mm
4. Manufacturers Specifications
4.1. MG 995 Servomotor Specification
4.2. Ax12A Servomotor Specification
4.3. Torque calculator
5. Work Areas
5.1. Area 1
5.2. Area 2
5.3. Area 3
5.4. Area 4
6. All Students task division (For information)
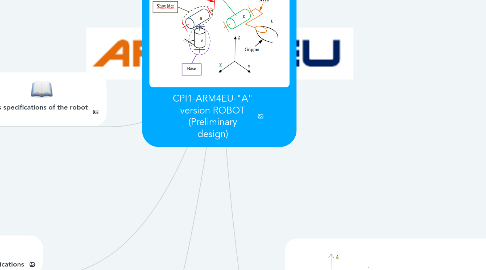
7. A version ROBOT student task
7.1. Weight
7.2. French student side
7.2.1. Task "Realize the shoulder"
7.2.1.1. The student of the project part have to complete this document
7.2.1.2. Realize the "B" y pivot links
7.2.2. Task "Realize the Arm"
7.2.2.1. The student of the project part have to complete this document
7.2.2.2. Design/realize the shape of the arm
7.2.2.3. Realize the "C" y pivot links
7.2.3. Task "Realize the Forearm"
7.2.3.1. The student of the project part have to complete this document
7.2.3.2. Design/realize the shape of the Forearm
7.2.3.3. Realize the "D" y pivot links
7.2.4. Task "Realize the Wrist"
7.2.4.1. The student of the project part have to complete this document
7.2.4.2. Design/realize the shape of the Wrist
7.3. Italian student side
7.3.1. Task "Realize the base"
7.3.2. Taxk "Realize the shoulder"
7.3.3. Task "Realize the gripper"