

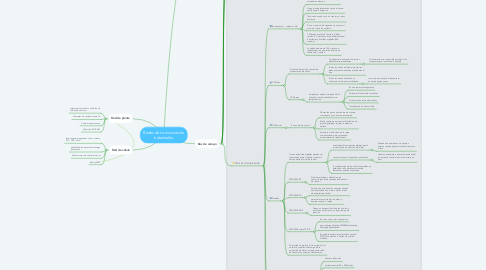
1. Red de planta
1.1. Interconecta módulos y células de fabricación entre si.
1.2. Mensajes de cualquier tamaño
1.3. Cubre áreas extensas
1.4. Ficheros CAD/CAM
2. Red de factoría
2.1. Tiempos de respuesta no son críticos.
2.2. Alto volumen de información intercambiada
3. Red de célula
3.1. Interconecta dispositivos como: robots, PLC, CNC, AGV.
3.2. posibilidad de transmitir mensajes prioritarios
3.3. Mecanismos de control de error
3.4. Redes MAP
4. Bus de campo
4.1. Sustituye el cableado entre sensores y actuadores.
4.2. Interconecta controladores con todo tipo de dispositivos de entrada y salida.
4.3. Permite controladores esclavos.
4.4. gestiona mensajes cortos eficientemente y maneja el trafico de eventos discretos
4.5. Tamaño de 5 a 50 nodos
4.6. TIPOS DE COMUNICACIÓN
4.6.1. Redes sensor - actuador: ASI
4.6.1.1. Elimina el cableado entre sensores y actuadores binarios
4.6.1.2. Proporciona alimentación sobre el mismo cable hasta 8 amperios
4.6.1.3. Técnica de sondeo con un maestro y varios esclavos
4.6.1.4. En un maximo de 5 segundo se conoce el valor de todos los esclavos
4.6.1.5. 1 Maestro controla 31 esclavos (62 en versión 2.1), cada esclavo pude direccionar 4 entradas y 4 salidas digitales (248 máximo)
4.6.1.6. Longitud máximo de 100 metros sin repetidores con una caída máxima de tensión de 3 voltios.
4.6.2. CAN bus
4.6.2.1. Protocolo basado en el principio productor/consumidor
4.6.2.1.1. Un dispositivo transmite los valores actuales correspondientes
4.6.2.1.2. Todos los nodos incluido el transmisor están activos mientras hay actividad en el bus
4.6.2.1.3. Todos los nodos actualizan su información de manera simultanea
4.6.2.2. CANopen
4.6.2.2.1. simplifica el empleo de redes CAN evitando controlar detalles como temporizacion
4.6.3. LONworks
4.6.3.1. Es una red de control
4.6.3.1.1. Transmiten pocos datos pero de manera muy segura y con tiempo restringido
4.6.3.1.2. Puede realizarse por control distribuido de igual a igual(peer to peer) o maestro esclavo
4.6.3.1.3. Permite la distribución de la carga computacional para procesado incrementando el rendimiento
4.6.4. Profibus
4.6.4.1. los controladores digitales pueden ser conectados entre si desde el nivel de campo hasta el nivel de control
4.6.4.1.1. Loa dispositivos maestros determinan la comunicación de datos sobre el bus
4.6.4.1.2. Los esclavos son dispositivos periféricos
4.6.4.1.3. la configuración de los sistemas profibus es abierta por ello distintas marcas de fabricantes pueden conectarse
4.6.4.2. PROFIBUS-DP
4.6.4.2.1. De alta velocidad y diseñado para comunicación entre sistemas automáticos de control
4.6.4.3. PROFIBUS-PA
4.6.4.3.1. Permite que actuadores y sensores puedan ser conectados a un mismo bus en areas de especial seguridad
4.6.4.3.2. permite la comunicación de datos y energía usando 2 cables
4.6.4.4. PROFIBUS-FMS
4.6.4.4.1. Tienen un intercambio de datos aciclico y buscan un sistema con un bajo tiempo de reaccion
4.6.4.5. PROFIBUS sobre TCP/IP
4.6.4.5.1. Se usa a traves de una pasarela
4.6.4.5.2. usa una especificacion MMS(Manufacturing Message Specification)
4.6.4.5.3. Es posible enviar mensajes sobre una red TCP/IP con destino a nodos de una red Profibus
4.6.4.6. Se emplea un protocolo de acceso al bus uniforme, también se encarga de la protección de datos, maneja protocolos de transmisión y tramas de mensajes
4.6.5. DEVICENet
4.6.5.1. Niveles de automatizacion medio-bajo(nivel de plata)
4.6.5.1.1. Maximo 64 nodos
4.6.5.1.2. distancia entre 100 y 500 metros
4.6.5.1.3. velocidad entre 125, 250 y 500 kbits
4.6.5.1.4. Usa una linea principal con bifurcacion de la linea hacia los nodos
4.6.5.1.5. mensajes de 8 bytes maximo
4.6.5.1.6. modelo de transmision basado en Productor/Consumidor
4.6.5.1.7. Emplea especificaciones del bus CAN
4.6.6. COMPOBUS
4.6.6.1. Su principal impulsor es Omron
4.6.6.1.1. esta diseñado para sistemas pequeños
4.6.6.1.2. sistema de comunicación de dos hilos
4.6.6.1.3. numero de entradas y salidas: 256
4.6.6.1.4. distancias de 500 metros