

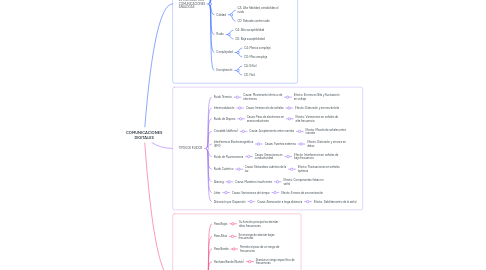
1. DIFERENCIAS CON COMUNICACIONES ANÁLOGAS
1.1. Aplicaciones
1.1.1. CA: Radio, TV análoga, audio
1.1.2. CD: Computadoras, redes, telecomunicaciones
1.2. Almacenamiento
1.2.1. CA: Difícil y con pérdida de señal
1.2.2. CD: Fácil y sin degradación
1.3. Capacidad de Transmisión
1.3.1. CA: Continua
1.3.2. CD: Discreta
1.4. Forma de Señal
1.4.1. CA: Coontinua
1.4.2. CD: Discreta
1.5. Calidad
1.5.1. CA: Alta fidelidad, sensibilidas al ruido
1.5.2. CD: Robusta contra ruido
1.6. Ruido
1.6.1. CA: Alta suceptibilidad
1.6.2. CD: Baja suceptibilidad
1.7. Complejidad
1.7.1. CA: Menos compleja
1.7.2. CD: Más compleja
1.8. Encriptación
1.8.1. CA: Difícil
1.8.2. CD: Fácil
2. TIPOS DE RUIDOS
2.1. Ruido Térmico
2.1.1. Causa: Movimiento térmico de electrones
2.1.1.1. Efecto: Errores en Bits y fluctuación en voltaje
2.2. Intermodulación
2.2.1. Causa: Interacción de señales
2.2.1.1. Efecto: Distorsión y errores de bits
2.3. Ruido de Disparo
2.3.1. Causa: Paso de electrones en semiconductores
2.3.1.1. Efecto: Variaciones en señales de alta frecuencia
2.4. Crosstalk (diáfono)
2.4.1. Causa: Acoplamiento entre canales
2.4.1.1. Efecto: Mezcla de señales entre canales
2.5. Interferencia Electromagnética (EMI)
2.5.1. Causa: Fuentes externas
2.5.1.1. Efecto: Distorsión y errores en datos
2.6. Ruido de Fluorescencia
2.6.1. Causa: Variaciones en conductividad
2.6.1.1. Efecto: Interferencia en señales de baja frecuencia
2.7. Ruido Cuántico
2.7.1. Causa: Naturaleza cuántica de la luz
2.7.1.1. Efecto: Fluctuaciones en señales óptimas
2.8. Aliasing
2.8.1. Causa: Muestreo insuficiente
2.8.1.1. Efecto: Componentes falsas en señal
2.9. Jitter
2.9.1. Causa: Variaciones de tiempo
2.9.1.1. Efecto: Errores de sincronización
2.10. Distorsión por Dispersión
2.10.1. Causa: Atenuación a larga distancia
2.10.1.1. Efecto: Debilitamiento de la señal
3. TIPOS DE FILTROS
3.1. Pasa Bajos
3.1.1. Su función principal es atenúar altas frecuencias
3.2. Pasa Altos
3.2.1. Se encarga de atenúar bajas frecuencias
3.3. Pasa Banda
3.3.1. Permite el paso de un rango de frecuencias
3.4. Rechaza Banda (Notch)
3.4.1. Atenúa un rango específico de frecuencias
3.5. Digital FIR
3.5.1. Respuesta finita, fase líneal
3.6. Digital IIR
3.6.1. Respuesta infinita, rápido
3.7. Mediana
3.7.1. Es no líneal, selecciona un valor mediano
3.8. Kalman
3.8.1. Encargado de filtrar datos ruidosos, óptimo en tiempo real
3.9. Adaptativo
3.9.1. Se ajusta en función de la señal
3.10. Suavizado (Promedio)
3.10.1. Elimina variaciones bruscas
3.11. Wavelet
3.11.1. Descomposición de frecuencia variable