

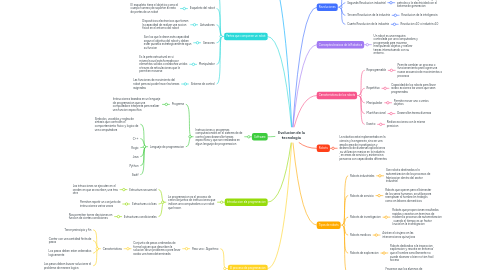
1. Hardware
1.1. El hardware se refiere a la estructura fisica, se diseña con una enfasis basado en el ambiente, en el usuario y en la tarea
2. Partes que componen un robot
2.1. Controlador: Crerebro del robot
2.1.1. Controla todas las funciones, movimientos, calculos y procedimientos de los datos mediante un miniordenador
2.2. Esqueleto del robot
2.2.1. El esqueleto tiene el objetivo,como el cuerpo humano,de soportar al resto de partes de un robot
2.3. Actuadores
2.3.1. Dispositivos electronicos que tienen la capacidad de realizar una accion fisica en el entorno del robot
2.4. Sensores
2.4.1. Son los que le daran esta capacidad segun el objetivo del robot y deben estar puestos estrategicamente egun su funcion
2.5. Manipulador
2.5.1. Es la parte estructural en si misma,la cual esta formada por elementos solidos o eslabones unidos a traves de articulaciones que le permiten moverse
2.6. Sistema de control
2.6.1. Las funciones de movimiento del robot para asi poder hacer las tareas asignadas
3. Software
3.1. Instrucciones o programas computacionales en el sistema de de control para desarrollar tareas especificas y que son realizadas en algun lenguaje de programacion
3.1.1. Programa
3.1.1.1. Instrucciones basadas en un lenguaje de programacion que una computadora interpreta para realizar una funcion especifica
3.1.2. Lenguaje de programacion
3.1.2.1. Simbolos, vocablos y reglas de sintaxis que controlan el comportamiento fisico y logico de una computadora
3.1.2.2. C++
3.1.2.3. Rogic
3.1.2.4. Java
3.1.2.5. Python
3.1.2.6. Switf
4. Introduccion ala programacion
4.1. La programacion es el proceso de crear conjuntos de instrucciones que indican una computadora o un robot que hacer.
4.1.1. Estructura secuencial
4.1.1.1. Las intrucciones se ejecutan en el oreden en que se escriben, una tras otra
4.1.2. Estructuras ciclicas
4.1.2.1. Permiten repetir un conjunto de instrucciones varias veces
4.1.3. Estructuras condicionales
4.1.3.1. Nos permiten tomar decisiones en funcion de ciertas condiciones
5. El proceso de programacion
5.1. Paso uno : Algoritmo
5.1.1. Conjunto de pasos ordenados de forma logican que describen la solucion de un problema o para llevar acabo una tarea determinada
5.1.1.1. Caracteristicas
5.1.1.1.1. Tener preincipio y fin
5.1.1.1.2. Contar con una cantidad finita de pasos
5.1.1.1.3. Los pasos deben estar ordenados logicamente
5.1.1.1.4. Los pasos deben buscar solucionar el problema de manera logica
5.2. Paso Dos: Diagramas de flujo
5.2.1. Es la representacion grafica de un algoritmo;herramientas de programacion que permite visualizar de manera general el desarrollo de la solucion de un problema
5.3. Paso Tres : Coficacion
5.3.1. Lenguaje de programacion de acuerdo a las reglas gramaticales o sintaxis del mismo
6. Revoluciones
6.1. Primera Revolucion industrial
6.1.1. Maquina de vapor
6.2. Segunda Revolucion industrial
6.2.1. Fuentes de energia com el gas,el petroleo o la electricidad con el sistema de generacion
6.3. Tercera Revolucion de la industria
6.3.1. Revolucion de la inteligencia
6.4. Cuarta Revolucion de la industria
6.4.1. Revolucion 4.0 o industria 4.0
7. Conceptos basicos de la Robotica
7.1. Un robot es una maquina controlada por una computadora y programada para moverse , manipulando objetos y realizar tareas interactuando con su entorno.
8. Caracteristicas de los robots
8.1. Reprogramable
8.1.1. Permite cambiar un proceso o funcionamiento para lograr una nueva secuencia de movimientos o procesos
8.2. Repetitivo
8.2.1. Capacidad de los robots para llevar acabo acciones las veces que sean programadas
8.3. Manipulador
8.3.1. Permite mover uno o varios objetos
8.4. Muntifuncional
8.4.1. Desarrollan tareas diversas
8.5. Exacto
8.5.1. Realiza acciones con la misma presicion
9. Robots
9.1. La robotica esta implementada en la ciencia y la engeneria ,sino en una amplia area de investigacion y desarrollo de divdersas aplicaciones ,su utilizacion masiva en la industria , en areas de servicio y asistencia a personas con capacidades diferentes
10. Tipos de robots
10.1. Robots industriales
10.1.1. Son robots destinados a la automatizacion de los procesos de fabricacion dentro del sector industrial
10.2. Robots de servicio
10.2.1. Robots que operan para el bienestar de los seres humanos ,se utiliza para reemplazar al hombre en trabajos como en labores domesticos
10.3. Robots de investigacion
10.3.1. Robots que proporcionan resultados rapidos y exactos en terminos de modernos procesos de automatizacion , cuando el tiempo es un factor crucial en la investigacion
10.4. Robots medicos
10.4.1. Asisten al cirujano en las intervenciones quirurjicas
10.5. Robots de exploracion
10.5.1. Robots dedicados a la inspeccion , exploracion y rescate en entornos que el hombre sencillamente no puede alcanzar o bien no tien facil acceso
10.6. Robots educativos
10.6.1. Favorece que los alumnos de cualquier edad se familiaricen y profundicen en el estudio de la Robotica y la programacion