TEORIAS DEL APRENDIZAJE Y CONTROL MOTORpor Nohemi Becerra
1. Teoría programación motora
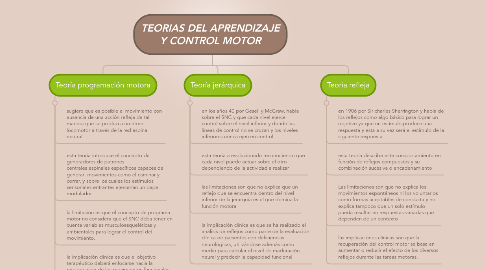
1.1. sugiere que es posible el movimiento con ausencia de una acción refleja de tal manera que se produzca un ritmo locomotor a través de la red espinal neutral
1.2. esta teoría introduce el concepto de generadores de patrones centrales espinales específicos capaces de generar movimientos como el caminar y correr, y sobre los cuales los estímulos sensoriales entrantes ejercerían un papel modulador
1.3. la limitación es que el concepto de programa motor no considera que el SNC deba tener en cuenta variables musculoesqueléticas y ambientales para lograr el control del movimiento.
1.4. la implicación clínica es que el objetivo terapéutico deberá enfocarse hacia la recuperación de los movimientos funcionales, más que en la reeducación aislada de los músculos.
2. Teoría jerárquica
2.1. en los años 40 por Gesell y McGraw, habla sobre el SNC y que cada nivel ejerce control sobre el nivel inferior y donde las líneas de control no se cruzan y los niveles inferiores nunca ejercen control
2.2. esta teoría a evolucionado reconociendo que cada nivel puede actuar sobre el otro dependiendo de la actividad a realizar
2.3. las limitaciones son que no explica que un reflejo que se encuentra dentro del nivel inferior de la jerarquía es el que domina la función motora
2.4. la implicación clínica es que se ha realizado el análisis de reflejos como parte de la evaluación clínica de pacientes con deficiencias neurológicas, utilizándose además como medio para calcular el nivel de maduración neural y predecir la capacidad funcional
3. Teoría refleja
3.1. en 1906 por Sir charles Sherrington y habla de los reflejos como algo básico para lograr un objetivo ya que un estímulo produce una respuesta y esta a su vez será el estímulo de la siguiente respuesta
3.2. esta teoría describe este comportamiento en función de reflejos compuestos y su combinación sucesiva o encadenamiento
3.3. Las limitaciones son que no explica los movimientos espontáneos ni los voluntarios como formas aceptables de conducta y no explica tampoco que un solo estímulo pueda resultar en respuestas variadas que dependen de un contexto
3.4. las implicaciones clínicas son que la recuperación del control motor se basa en aumentar o reducir el efecto de los diversos reflejos durante las tareas motoras.