
ROVER SI-22A
da Alfred Lehmann
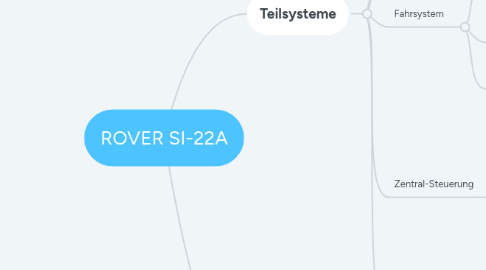
1. Teilsysteme
1.1. Distanzmessung
1.1.1. Entfernungsmessung (US-Sensoren)
1.1.1.1. 3 Front-Sensoren
1.1.1.2. 1 Heck-Sensor
1.1.2. Tiefenmessung (IR-Sensoren)
1.1.2.1. 2 IR-Sensoren
1.1.3. Datenübertragung
1.2. Messstation (Umweltdaten)
1.2.1. CO2-Gehalt
1.2.2. Temperatur
1.2.3. Luftfeuchte
1.2.4. Datenübertragung
1.3. Fahrsystem
1.3.1. Lenksystem
1.3.1.1. 4 Servos
1.3.1.2. Berechnung der Winkel
1.3.2. Antriebssystem
1.3.2.1. Berechnung der Geschwindigkeit
1.3.2.2. 6 GM-Motoren
1.3.3. Datenübertragung
1.4. Zentral-Steuerung
1.4.1. zyklisches Abfragen der Teilsysteme
1.4.2. Hindernisüberwachung
1.4.3. Ansteuerung der Teilsysteme
1.4.4. Umsetzung der Fernsteuerung
1.4.5. Datenübertragung
1.4.5.1. WIFI
1.4.5.2. I2C
1.5. Fernsteuerung
1.5.1. Datenübertragung
1.5.1.1. WIFI
1.5.2. Controller